Over the last years we have spent a significant research effort on analysis of the multiple-IMU (MIMU) systems and platforms we have built. Recently we have had result of two major efforts published:
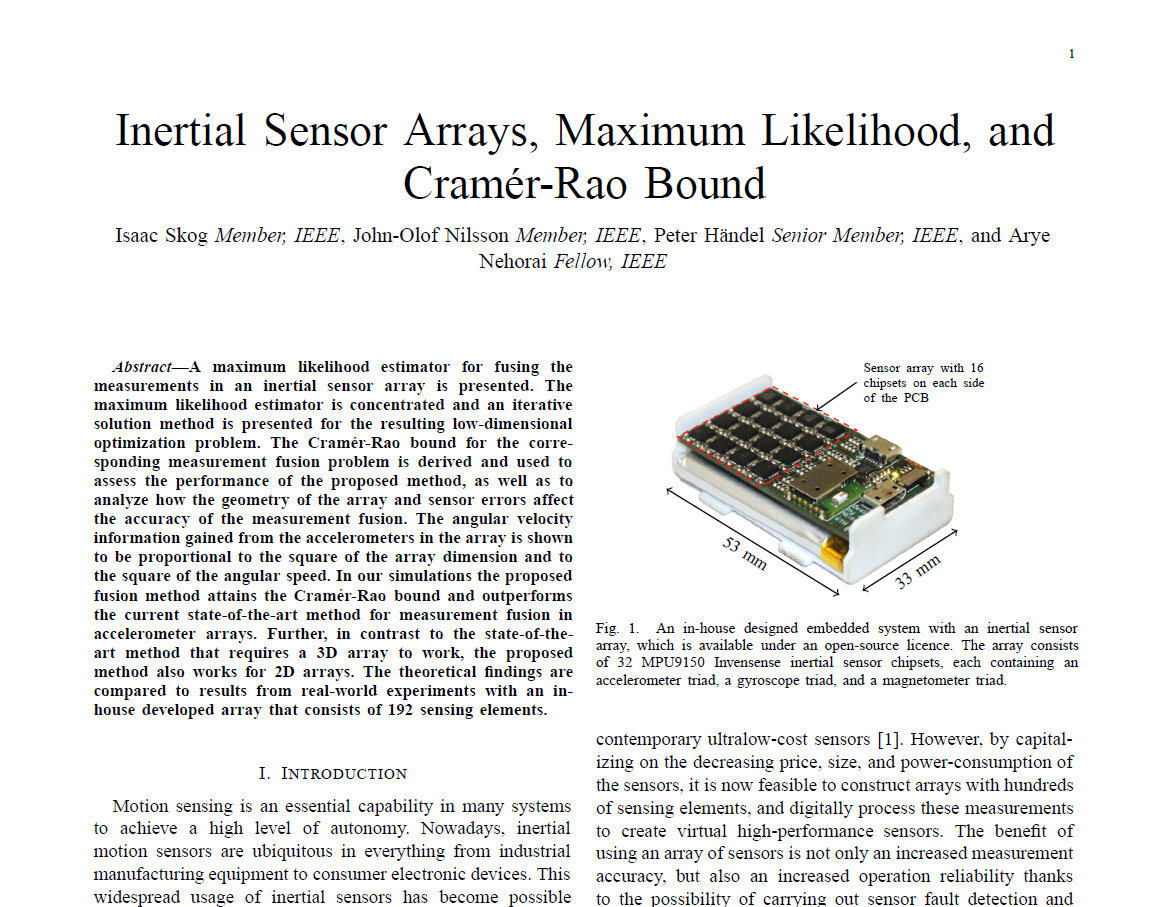
I. Skog, J.-O. Nilsson, P. Händel, A. Nehorai, “Inertial Sensor Arrays, Maximum Likelihood, and Cramér–Rao Bound”, IEEE Transactions on Signal Processing, vol. 64, no. 16, pp. 4218 — 4227, 2016.
The article contains the first estimation theoretical formulation and analysis of MIMU systems. The formulation makes it possible to analys fundamental properties of such systems and to derive efficient estimators. In the article,we:
- Derive bound on the achievable performance of MIMU-systems
- Suggest an efficient (achieving the bounds) maximum-likelihood estimators for such systems
- Analyze the properties and performance of MIMU-systems by simulations an experimental data
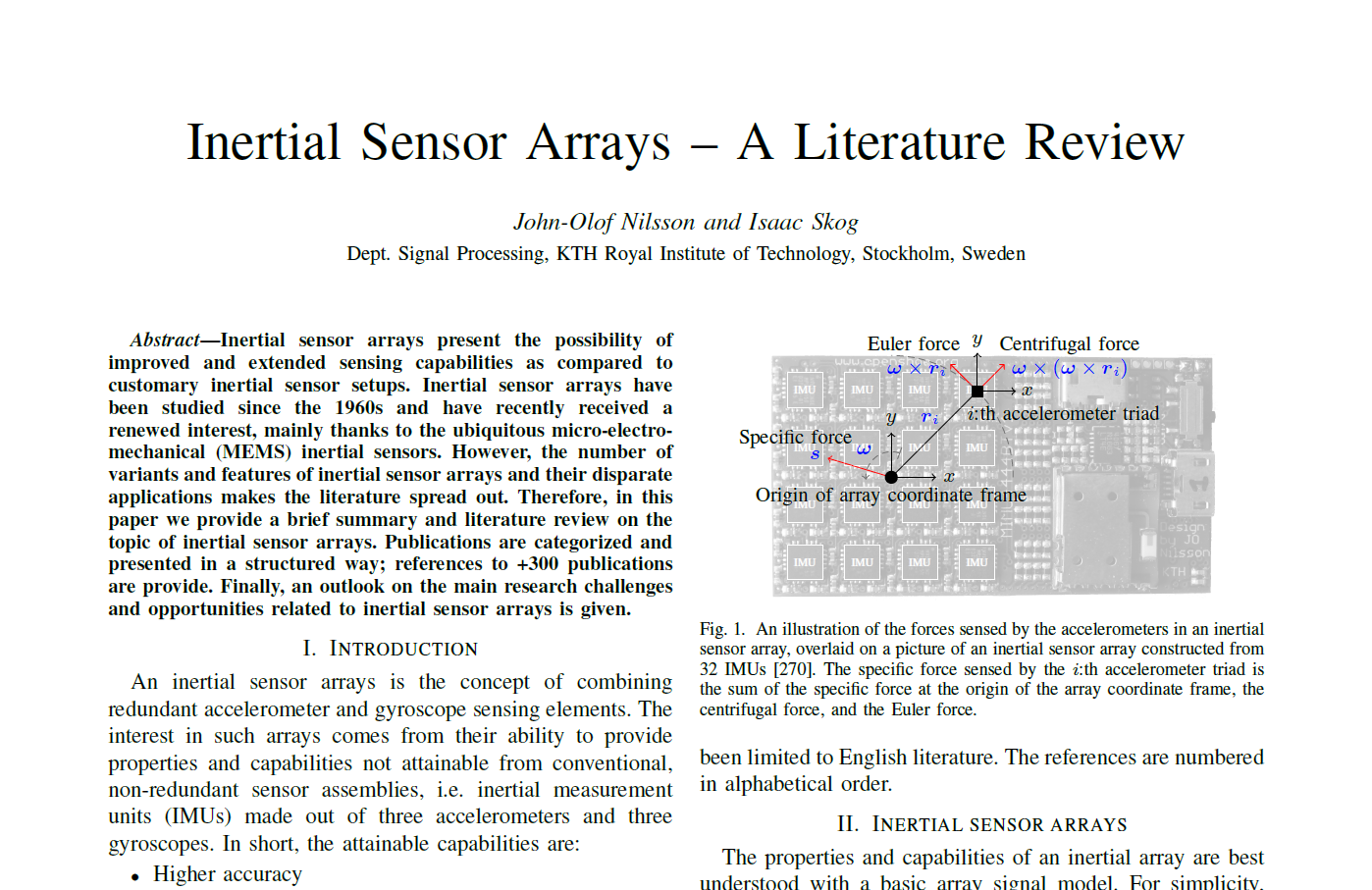
J.-O. Nilsson and I. Skog, “Inertial sensor arrays — a literature survey”, Proc. of 2016 European Navigation Conference (ENC), 30 May — 2 June, Helsinki, Finland, 2016.
Working with MIMU systems, we have come to realize that the related results are very much spread out and poorly crosscited. Therefore, we compiled a literature survey consisting of some +300 publications, categorized according to array setup, study area and application. The survey also contains a description of fundamental system properties of inertial arrays. Our hope is that the survey will provide the interested reader with an overview of the topic and inspire further research in an area where the rapid development of sensor and computational technologies provides many new opportunities.